Motivation:
Eric Grimson (MIT Professor) taught OOPs concept and Encourage me to complete this project.
Really... It's a funny and challenging project and after completing this project I learned about what is the real strength of OOPs in the It Industry.
Project information
- Name : MIT(6.00.2x) : Simulating Robots
- Aim : Implement Classes for Floor Cleaner Robot.
- Language : Python
- Concept : OOPs,Problem solving skills.
- Front-End : Supported by MIT.
- GitHub : Code
Description
In This project MIT(6.00.2x) course( edX) give me to Implement classes for floor cleaner robots and compare Radom and Standard Walk Robot steps and timing.
-
Simulation:
-
Exmaple: Above simulation is standard walk robots after touch wall their change direction.
While in Random Walk every steps robots change their direction. -
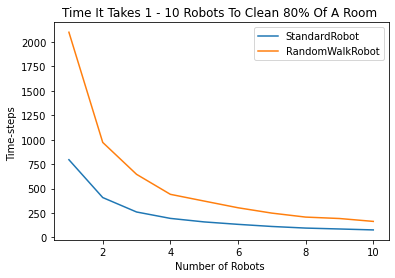
Comparision:
In Below Image we can see If We have less number of robots that time standard robot wins with less number of steps,
But If We have 10 Robot Or Above then that Time both robots take almost same steps